
Un equipo de investigadores ha desarrollado un sistema que combina un brazo robótico, el UR5e, y una inteligencia artificial para analizar firmas y detectar fraudes. El robot registra datos sobre los movimientos al escribir, y una red neuronal aprende a estimarlos solo observando firmas digitalizadas. Los resultados muestran una precisión superior a los métodos tradicionales cuando la información robótica se incorpora, haciendo más difícil la tarea de los impostores.
La firma manuscrita sigue siendo un método muy usado para identificar a una persona en documentos legales y transacciones. Pero ¿qué pasa cuando alguien intenta falsificarla? En un nuevo estudio hemos combinado un brazo robótico y una inteligencia artificial para analizar firmas de manera precisa y detectar fraudes con mayor fiabilidad.
El problema de las firmas falsificadas
Falsificar una firma no es tan difícil como parece. Existen falsificadores expertos que pueden imitar con gran precisión los trazos de una firma real. Los sistemas tradicionales de verificación se basan en comparar la apariencia visual de una firma con otra, pero esto no siempre es suficiente.
La clave está en que no solo importa la apariencia de la firma, sino en cómo se realiza: la velocidad del trazo, la presión ejercida sobre el papel y los movimientos de la mano. Capturar estos detalles ayuda a diferenciar entre una firma genuina y una falsificada.
La solución: un brazo robótico que firma
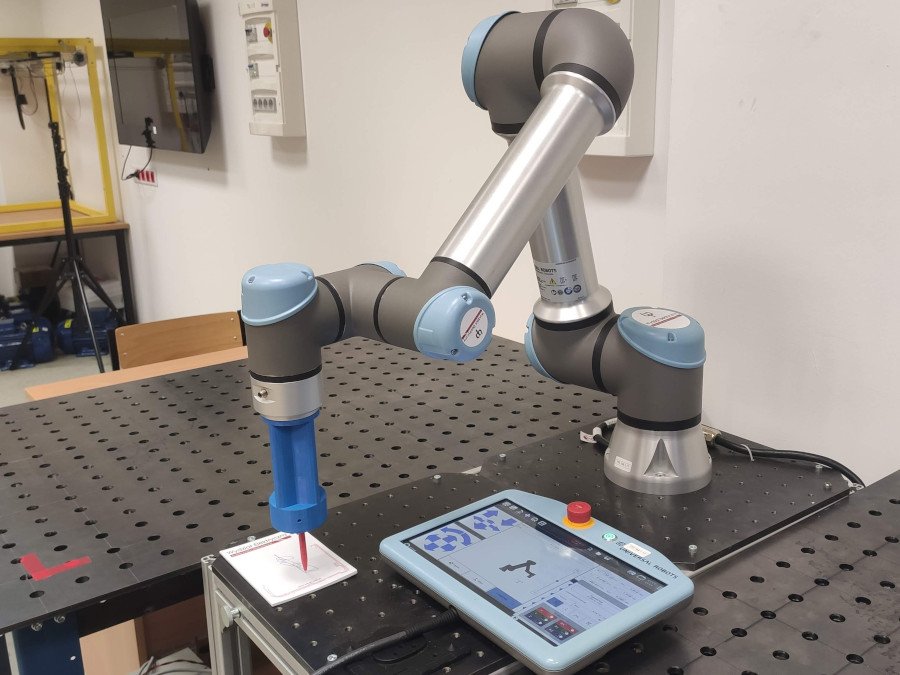
Para abordar este problema hemos utilizado un brazo robótico llamado UR5e. Este robot es capaz de imitar la escritura humana y medir con precisión los movimientos que realiza al escribir una firma. Durante el experimento, el robot registró datos sobre la velocidad, los ángulos de movimiento y las fuerzas necesarias para ejecutar cada firma.
Pero, ¿cómo aplicar esta tecnología sin necesidad de un robot en cada verificación de firma? Aquí entra en juego la inteligencia artificial.
Inteligencia artificial que aprende a analizar firmas
Para predecir los movimientos de la mano a partir de los datos que el UR5e proporcionaba cuando ejecutaba una firma hemos entrenado una red neuronal artificial, un modelo matemático codificado que imita el aprendizaje humano. De este modo, en lugar de usar un robot físico cada vez, la inteligencia artificial aprendió a estimar los mismos datos que obtenía el brazo robótico, pero solo observando la firma digitalizada.
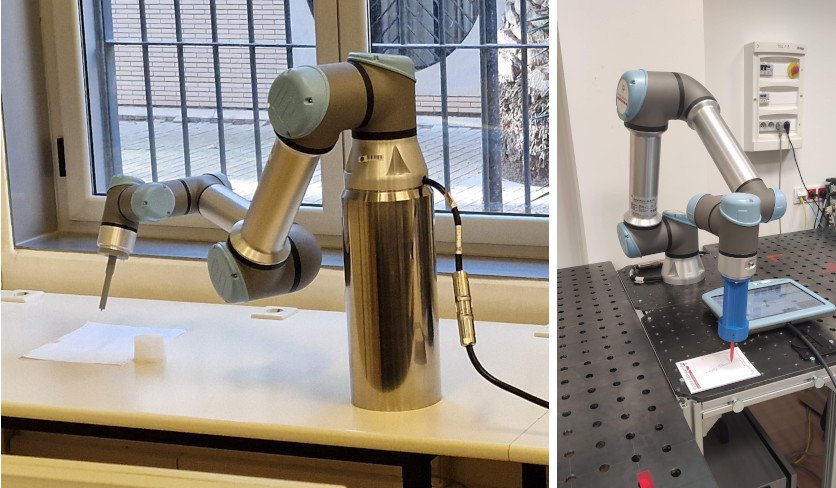
Robot UR5e que escribe en la Universidad de Las Palmas de Gran Canaria (España), a la izquierda, y el mismo robot en la Bialystok University of Technology (Polonia)
Este sistema preentrenado ha sido comprobado en verificadores automáticos de firmas para incorporar información adicional a la información tradicional obtenida de las tabletas digitalizadoras. Al incorporar esta información “robótica” hemos logrado mejorar las tasas de reconocimiento de usuarios, permitiendo detectar si una firma es real o falsificada con una precisión sorprendente.
¿Cómo mejora la seguridad?
La combinación de robots y redes neuronales puede revolucionar la verificación de firmas en bancos, notarías y empresas que manejan documentos legales. En el futuro, podría incluso ayudar a evitar fraudes en contratos y testamentos.
Además, pensamos que es posible mejorar esta tecnología construyendo brazos robóticos que imiten aún mejor el movimiento humano. Con avances como estos, podría ser cada vez más difícil engañar a los sistemas de verificación con firmas falsificadas. Este estudio demuestra que la combinación de robótica e inteligencia artificial no solo mejora la seguridad, sino que podría cambiar la manera en que validamos documentos manuscritos en la era digital.
Referencia:
Moises Diaz, Miguel A. Ferrer, Jose Juan Quintana, Adam Wolniakowski, Roman Trochimczuk, Konstantsin Miatliuk, Giovanna Castellano, Gennaro Vessio (2025), Neural network modelling of kinematic and dynamic features for signature verification, Pattern Recognition Letters. Vol 187, pp. 130-136. doi: 10.1016/j.patrec.2024.11.021
Autor del artículo divulgativo:
Moises Diaz
Universidad de Las Palmas de Gran Canaria
ORCID: 0000-0003-3878-3867
Fuente: Scientias
Artículo bajo licencia Creative Commons – Atribución (CC BY 4.0). Este artículo puede ser reproducido íntegramente siempre y cuando vaya firmado por los autores y se acredite SCIENTIAS como fuente, incluyendo el enlace a nuestra página.