
UJI-Butler es un “mayordomo” robótico desarrollado por la Universitat Jaume I que combina razonamiento simbólico y no simbólico para aprender tareas nuevas por sí solo. Sus creadores han investigado cómo mejorar la comprensión y adaptación del robot en entornos sociales, y los resultados muestran que el sistema aprende de forma eficiente tareas complejas si lo hace mediante “interacción multimodal”, es decir, a través del lenguaje, la visión y los gestos. Se trata de avances que son clave para el desarrollo de robots asistentes más intuitivos y autónomos.
En un trabajo publicado recientemente en International Journal of Social Robotics presentamos al robot “mayordomo” UJI-Butler, que hemos diseñado con el objetivo de que aprenda a ayudar a las personas de forma natural, parecida a la de un asistente humano. Queríamos que fuera capaz de entendernos y aprender nuevas tareas sin necesidad de que un experto lo programe cada vez. Para lograrlo, nos centramos en que el robot pudiera aprender a través de diferentes formas de comunicación, como el lenguaje hablado, los gestos, las imágenes y los objetos que hay a su alrededor. A esto lo llamamos “interacción multimodal”, que no es más que combinar varios sentidos al mismo tiempo, como lo hacemos las personas cuando hablamos y señalamos algo.
Dos tipos de razonamiento
Lo que hace especial a este robot es que combina dos formas diferentes de razonar. Una forma sigue reglas claras y estructuradas, como cuando seguimos paso a paso una receta, es lo que llamamos razonamiento simbólico. La otra se basa en aprender a partir de ejemplos, permitiéndole adaptarse mejor cuando las cosas no son exactamente como las ha aprendido antes; esto lo conseguimos mediante razonamiento no simbólico basado en redes neuronales. Gracias a esta combinación, el robot no solo puede seguir instrucciones, sino también aprender por su cuenta y ajustarse a nuevas situaciones. Esto lo hace mucho más útil en la vida diaria, donde las cosas no siempre son iguales ni predecibles.
El robot aprende observando cómo hacemos las cosas las personas
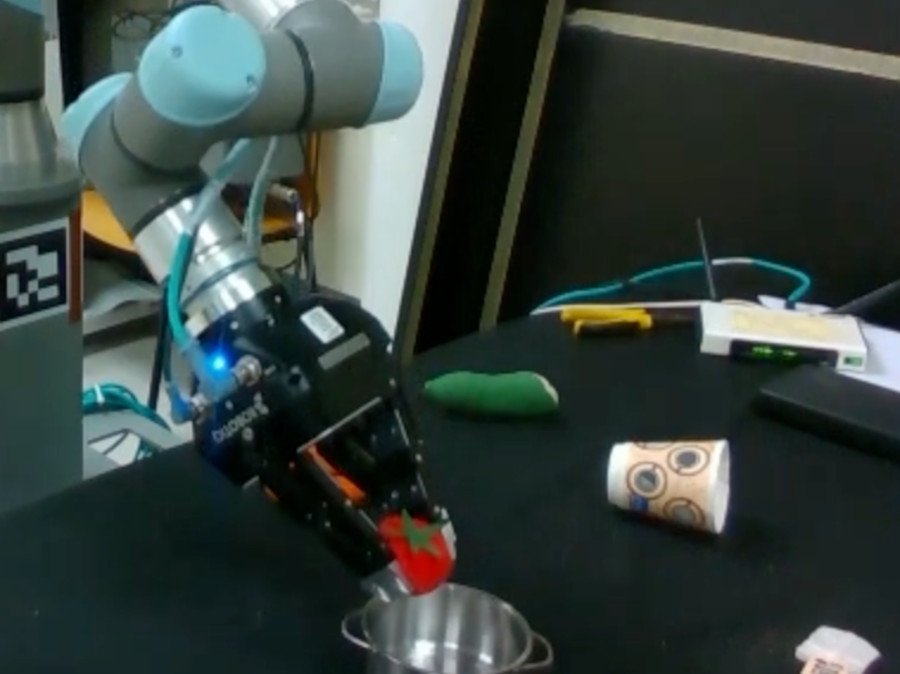
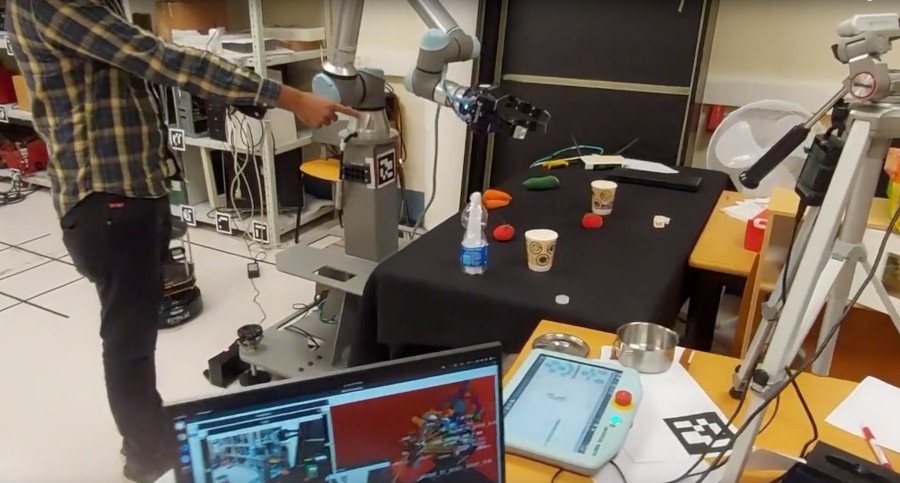
Durante nuestras pruebas, vimos que UJI-Butler era capaz de entender órdenes que le dábamos de diferentes maneras. Por ejemplo, si le pedíamos que nos trajera una taza y señalábamos con la mano, el robot podía juntar lo que oía y lo que veía para entender lo que le estábamos pidiendo. También pudo aprender nuevas tareas observando cómo lo hacíamos nosotros o escuchando nuestras explicaciones. En algunos casos, incluso pudo adaptarse cuando algo cambiaba en el entorno, como cuando algún objeto no estaba en su lugar habitual. En vez de quedarse parado o fallar, el robot buscaba alternativas o nos preguntaba qué hacer.
Nos interesaba especialmente que el robot pudiera comunicarse de forma natural, sin que las personas tengan que aprender comandos especiales ni saber de tecnología. El objetivo es que cualquier persona pueda hablar con el robot como lo haría con otro ser humano, usando palabras sencillas, señales con las manos o mostrando cosas. Se trata de una meta muy importante si queremos que los robots formen parte de nuestro día a día, ya sea en casa, en el trabajo o en otros espacios donde puedan colaborar con nosotros.
Interacción directa con las personas
Uno de los logros más importantes de este proyecto ha sido demostrar que un robot puede aprender tareas complejas a través de la interacción directa con personas, sin necesidad de depender por completo de una programación fija. Esto permite que el robot se vuelva más autónomo y flexible, dos cualidades esenciales si queremos que realmente nos ayuden en entornos reales. No se trata solo de que hagan lo que les decimos, sino de que entiendan, aprendan y se adapten como lo haría un compañero humano.
Con UJI-Butler hemos dado un paso más hacia la creación de robots que no solo estén presentes físicamente, sino que también comprendan el mundo de las personas. Queremos que sean capaces de aprender con nosotros, de convivir con nosotros, y de colaborar en tareas cotidianas de forma útil y natural. Aunque todavía queda camino por recorrer, este proyecto nos acerca a un futuro donde los robots puedan ser verdaderos asistentes personales, capaces de comprender nuestras necesidades y de actuar en consecuencia, sin que tengamos que explicarles todo con exactitud cada vez.
En resumen, con este trabajo demostramos que es posible construir un robot que aprenda y se comunique de forma parecida a los humanos, usando múltiples formas de interacción y adaptándose a distintas situaciones. Creemos que este tipo de robots puede tener un papel muy positivo en nuestra sociedad, facilitando la vida de las personas y colaborando en diferentes entornos de manera inteligente, cercana y respetuosa.
Referencia:
Bassiouny, A., Elsayed A.H., Falomir, Z., del Pobil, A.P., 2025, UJI-Butler: A symbolic/non-symbolic robotic system that learns through multi-modal interaction, International Journal of Social Robotics (2025). DOI: 10.1007/s12369-025-01234-5
Autores del artículo divulgativo:
Ángel Pascual del Pobil
Laboratorio de Inteligencia Robótica, Universidad Jaume I (UJI)
Abdelrhman Bassiouny
Institute For Artificial Intelligence, Universität Bremen, Alemania
Ahmed H. Elsayed
German Research Center for Artificial Intelligence, Oldenburg, Alemania
Zoe Falomir
Computing Science Department, Umeå University, Suecia
Fuente: Scientias
Artículo bajo licencia Creative Commons – Atribución (CC BY 4.0). Este artículo puede ser reproducido íntegramente siempre y cuando vaya firmado por los autores y se acredite SCIENTIAS como fuente, incluyendo el enlace a nuestra página.